
تبدیل موتور های سرو یی که تنها 180 تا 270 درجه آزادی برای چرخش دارند به موتور سرویی که با 360 درجه آزادی قابل کنترل است .
ممکنه خیلی وقت ها براتون پیش اومده باشه که یک موتور نسبتا پر قدرت و کوچیک نیاز داشته باشید و حتی اگه توان مصرفیش هم کمتر باشه که چه بهتر و اگه بدون نیاز به درایور هم به میکرو وصل بشه که دیگه خیلی عالیه .

موترو های سرویی که داخل بازار هست چند تا از این مشخصات رو داره :
1- مصرف کم توان
2- قدرت بسیار زیاد
3- اتصال به میکرو بدون نیاز به درایور
4- ابعاد مناسب برای نصب روی بدنه روبات
اما مشکلی این موتور ها این است که چون این موتور ها بیشتر داخل هواپیما های مدل استفاده میشوند آزادی چرخش شون حدود 270 درجه است .
مثلا وقتی شما پالسی با عرض 100 میکرو ثانیه با اون بدین در ابتدای مسیر قرار میگیره و هنگامی که 200 پالس بدین در انتهای مسیر .

در اینجا ما قصد داریم روشی جدید و بسیار جالب رو بهتون آموزش بدین تا بتونید موتور سرو معمولی رو به یک موتور 360 درجه قابل کنترل تبدیل کنید .
قدم اول :
پیچ های موتور سرویی که در اختیار دارید مثل شکل زیر باز کنید

قدم دوم :
همان طور که در شکل می بینید موتور های سرو دارای 4 قسمت اصلی هستند
1- موتور DC معمولی
2- مدار کنترل و راه انداز موتور
3- مسیر فیدبک (مقاومت متغییر – ولوم )
4- چرخ دنده و گیربکس
کاری که دراین قسمت انجام میدهیم این است که پتانسیومتر را از جای خود در می آوریم برای مرحله بغد .

قدم سوم :
سه سیم به پتانسومتر لحیم شده که آنها را جدا می کنیم و سیمی که به پایه وسط وصل است را علامت میزنیم که مشخص باشد ( برای اینکه با بقیه مخلوط نشود چون در محله بعد لازمش داریم).

قدم چهارم :
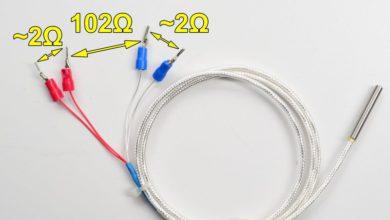
در این مرحله دو عدد مقاومت 2.7 کیلو اهم را طوری به هم لحیم میکنیم که از هر مقاومت یک سر به سر دیگر مقاومت متصل باشد حال 3 پایه داریم
1- پایه دوم مقاومت اول
2- پایه دوم مقاومت دوم
3- پایه مشترک دو مقاومت
در این لحظه پایه مشترک را به همان سیم وسط ولوم در مرحله قبل لحیم کنید و دو سر دیگر را به دو سیم باقی مانده لحیم کنید که مهم نیست کدام را به کدام لحیم کنید .

قدم پنجم :
در همه سرو موتورها یک زائده روی چرخ دنده وجود دارد که اجازه نمی دهد که موتور بیشتر از 270 درجه آزادی داشته باشد ، در این قسمت شما بایستی مثل شکل زیر آنرا از چرخ دنده جدا کنید

قدم ششم :
در اینجا هم موتور را به حالت اولیه می بندیم .

قدم هفتم :
ای بابا این قدر قدم زدیم خسته شدیم !
خوب دیگه تموم شده میتونید استراحت کنید.
نحوه کار مدار به شکل زیر است :

خصوصیات این مدار :
با ساخت این مدار شما علاوه بر 360 درجه چرخش به سمت راست و چپ میتوانید سرعت چرخش رو هم خودتون مشخص کنید .
مثلا اگه پالس با عرض 145میلی ثانیه به موتور بدین ، موتور به آرامی به سمت چپ حرکت میکند ، حال هرچه پالس را کوچکتر کنید تا 100 میلی ثانیه موتور با سرعت بیشتری به سمت چپ گردش میکند .
این مطلب در جلسه انجمن فعالان روباتیک در تاریخ 30 بهمن 1389 ارائه گردید

این فایل های ppt چیه با چی باز کنم؟
با پاور پوینت power point
از مجموعه نرم افزار های Office